
SafeNav Project Progress – November 2023
December 8, 2023
SafeNav Project Progress – December 2023
January 12, 2024SafeNav Team Presents on Collision Avoidance & COLREGs at ICMASS 2023

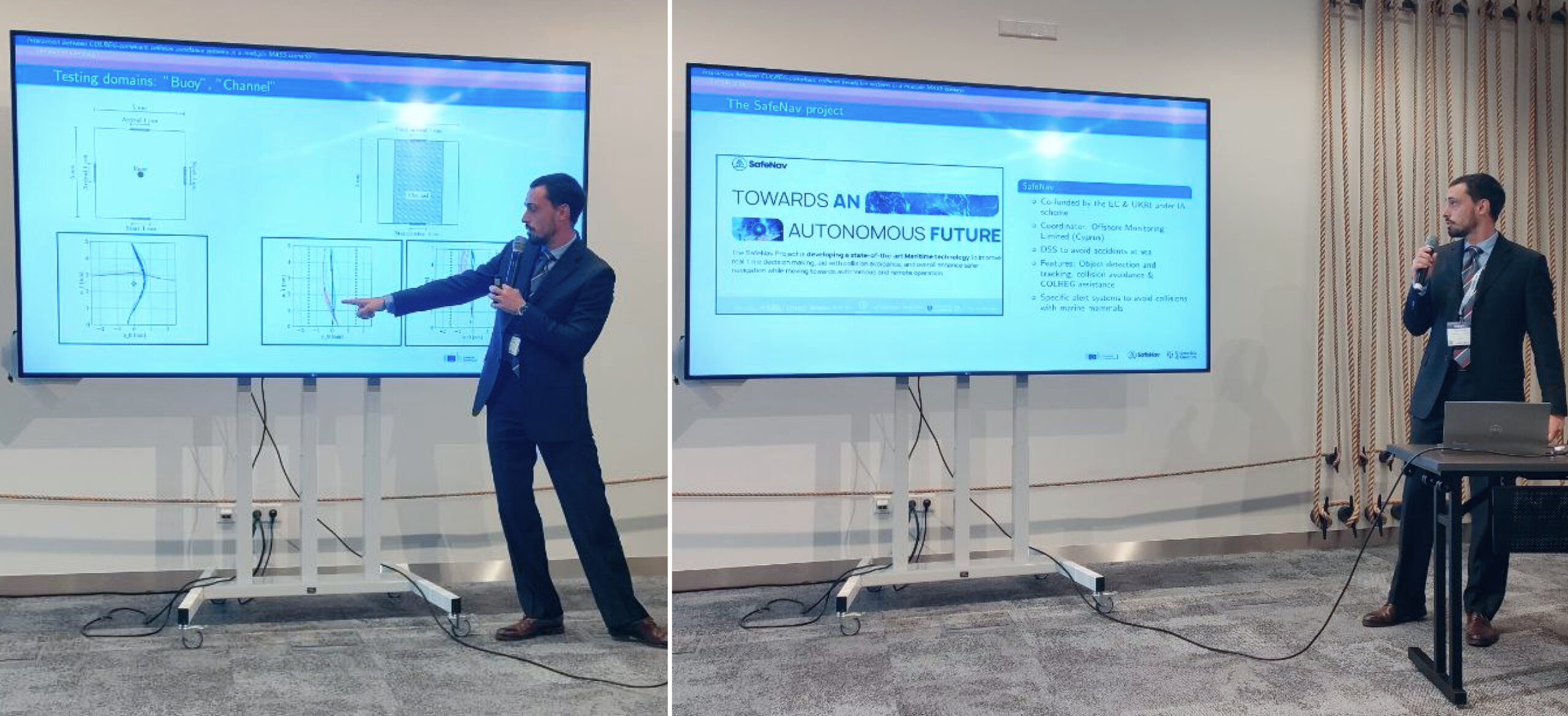
The SafeNav Project team participated in the International Conference on Maritime Autonomous Surface Ship (ICMASS) in Rotterdam, The Netherlands in early November 2023.
Raphael Zaccone and Michele Martelli, Project Team members representing the University of Genova (UNIGE), presented a jointly authored paper titled “Interaction between COLREG compliant collision avoidance systems in a multiple MASS scenario”, which explores the integral role COLREGs will play in assisting collision avoidance systems as the industry transitions to fully autonomous shipping.
The two-day international conference showcased the latest developments in autonomous ship technologies, specifically progress in Maritime Autonomous Surface Ships (MASS) development, to both industry and academic researchers.



{kind=link}
{kind=link}
{kind=link}
The SafeNav Project team participated in the International Conference on Maritime Autonomous Surface Ship (ICMASS) in Rotterdam, The Netherlands in early November 2023.